Промышленные роботы в современном производстве
Современное производство трудно представить без автоматики и поточных линий. Промышленная робототехника позволила сделать огромный прыжок в повышении производительности и обеспечении качества продукции. Сегодня выпускается множество роботов различного назначения, в их особенностях стоит разобраться подробнее.
- Что такое промышленная робототехника?
- Из чего состоит ПР: устройство
- Функции ПР: принцип работы
- Назначение и схема
- Топовые производители
- Сферы применения промышленных роботов
- Перспективы использования
Что такое промышленная робототехника?

Представляет собой специфическую отрасль, связанную с разработкой и изготовлением роботизированных аппаратов и систем, используемых для автоматизации производственных процессов и замены ручного труда человека. Она заявила о себе в 30–50 годах прошлого столетия, а активное развитие получила в 70–80 гг.
Что называют промышленными роботами?
В общем случае промышленные роботы (ПР) — это автоматические устройства, способные осуществлять двигательные и управляющие действия в производственном процессе по заданной программе. Они используются для выполнения разнообразных технологических операций и перемещения предметов без участия человека или под его контролем.
В настоящее время применяются следующие основные типы ПР:
- Автоматические устройства. Наиболее простые представители этой категории — роботы с жестким программным управлением или программные роботы. Эти аппараты первого поколения работают по введенной управляющей программе (УП), без учета изменения внешних факторов. Более сложными являются роботы с адаптивным управлением (адаптивные роботы). В них предусмотрена система датчиков и сенсорные элементы, которые позволяют переключаться автоматически с одной программы на другую при изменении внешних условий. К третьему поколению автоматических аппаратов относятся обучаемые роботы. В ходе отработки технологического процесса происходит корректировка УП, и в последующем робот действует с учетом этих изменений, т. е. по оптимальной программе. Наконец, последнее поколение автоматических роботов имеет элементы искусственного интеллекта (интеллектуальные роботы). Они способны с помощью своей сенсорной системы анализировать внешние условия и осуществлять действия с учетом изменений в окружающем мире.
- Биотехнические аппараты. Эта категория включает несколько разновидностей. Командные роботы или манипуляторы, движения которого задает оператор дистанционно. Копирующие роботы работают по принципу повторения движений задающего устройства, управляемого человеком. Для управления полуавтоматическими роботами оператор задает движение основному рабочему органу, а работа сочленений согласуется автоматически.
- Интерактивные роботы. В этой группе выделяются автоматизированные, супервизорные и диалоговые роботы. Автоматизированные механизмы сочетают работу в автоматическом режиме по программе с командным управлением оператором. Супервизорные роботы способны обеспечить многооперационный производственный цикл в автоматическом режиме, но переход от одной операции к другой осуществляется по команде оператора. Диалоговые роботы работают в автоматическом режиме, поддерживая связь с оператором на специальном языке (команды оператора и обратная связь от робота).
По своему назначению промышленные роботы разделяются на такие виды:
- Универсальные. Способные осуществлять различные технологические операции.
- Специализированные. Они предназначены для выполнения определенной работы.
- Специальные. Эти роботы имеют особую конструкцию и способны работать в особых условиях или выполнять специальную функцию.
Во всех указанных категориях ПК могут подразделяться на несколько разновидностей. По грузоподъемности выделяются легкие (до 10 кг), средние (11–200 кг), тяжелые (от 200 кг до 1 тн) и сверхтяжелые (более 1 тн) роботы. По маневренности выпускаются подвижные и стационарные аппараты. По способу установки предлагаются напольные, подвесные и встроенные ПК. Выбор робота осуществляется с учетом конкретных производственных задач и условий эксплуатации.
Из чего состоит ПР: устройство
Конструкции ПР зависят от их назначения и типа и могут существенно отличаться друг от друга по форме элементов, компоновке и сложности. Однако функциональная схема у них аналогична. В состав всех роботов входят: механическая часть и система управления. В более сложных аппаратах присутствует информационно-сенсорная система со средствами очувствления.
Механическая часть включает такие элементы:
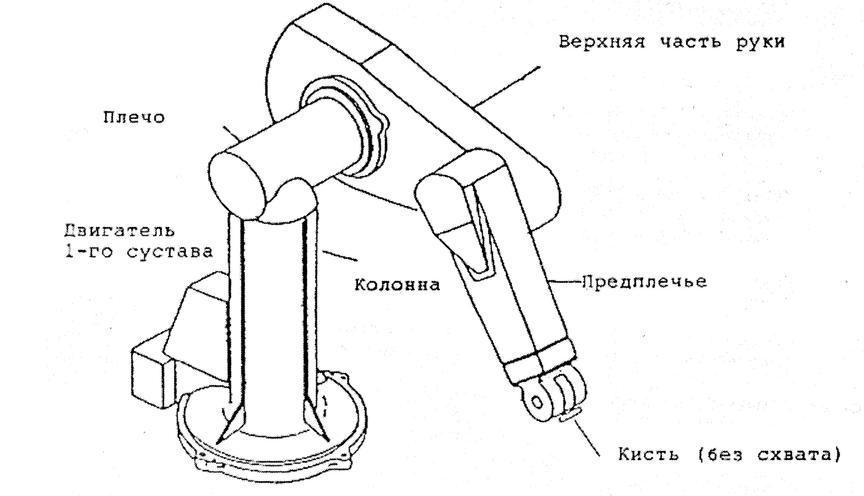
- Манипулятор. Это устройство, ответственное за двигательную функцию. Робот может иметь один или несколько манипуляторов. Их основу составляет исполнительный механизм, состоящих из нескольких подвижных элементов, соединенных специальными сочленениями с разной степенью подвижности. Сочленения (кинематические пары) могут двигаться в декартовой (поступательное движение), цилиндрической (2 поступательных и 1 вращательное движение), сферической (1 поступательное и несколько вращательных движений) и угловой (только вращательные движения) системе координат.
- Рабочий орган. Он устанавливается на конце манипулятора и предназначен для непосредственного осуществления технологической операции. Самый распространенный вариант — «схват», т. е. захватывающее устройство для подъема, удержания и перемещения предметов. Это могут быть «механические пальцы», механизмы с пневматической присоской, крюки, черпаки, совки, магнитные захваты и т. п. Рабочий орган может представлять собой устройство для закрепления технологического инструмента или непосредственно сам инструмент (например, краскопульт, пульверизатор, сварочные клещи, диск, гайковерт и т. д.).
- Привод. Они необходимы для передачи движения манипулятору. В ПР могут использоваться электрические, гидравлические и пневматические приводы. Более половины всех роботов оснащены электрическим приводом. Каждое сочленение может иметь свой шаговый электродвигатель.
Система управления базируется на промышленных компьютерах мобильного типа (например, РС/104, MicroPC), а само управление манипулятором осуществляется с ПК и программируемого контроллера. Для программирования используются языки: Forth, Оберон, Компонентный Паскаль, Си. Управление роботами согласовывается с общей системой управления производством (ERP-системой).
Информационно-сенсорная система позволяет адаптировать роботов к изменяющимся внешним условиям. Для обеспечения необходимой чувствительности применяются внутренние датчики перемещения, линейных и угловых скоростей, сил сочленения, а также внешние датчики для получения сведений о состоянии окружающей среды (тактильные, акустические, визуальные, локационные, температурные, химические датчики).
Функции ПР: принцип работы

Современные ПР могут использоваться для перемещения или удержания предметов, а также осуществления технологических операций. Необходимые движения обеспечиваются манипулятором. Часто принцип его работы сравнивается с человеческой рукой, а потому и форму он обычно имеет аналогичную. Движения манипулятора подразделяются на 2 этапа: захват (аналог — кисть руки) и перемещение (плечо и суставы рук) предмета или инструмента. Для этого в сочленениях обеспечивается поступательное и вращательное движение.
Алгоритм действий робота задается программой. Он включает несколько характерных этапов:
- Определение местонахождения нужного предмета (детали) в пространстве и перемещение рабочего органа к нему. При стационарной установке ПР движется только манипулятор. Для осуществления функции транспортировки перемещается сам робот.
- Захват предмета. Подается команда на рабочий орган.
- Перемещение предмета по заданной траектории и установка его в рабочей зоне.
- Осуществление технологической операции (обработка детали, покраска, сварка, упаковка и т. п.).
- Съем готовой детали и удаление ее из рабочей зоны. Перемещение ее в место складирования.
- Возвращение манипулятора или всего робота в исходное положение.
Современные ПР оснащены сенсорной системой, способной обеспечить обратную связь. При изменении внешних условий (например, изменился размер предмета или его местонахождение) датчики фиксируют расхождение с программой и сообщают фактические данные.
Важно! Интеллектуальные ПР способны сами принять решение и внести коррективу в УП. Другие роботы передают информацию оператору, который вносит нужные коррективы.
Назначение и схема
Технологические ПР находят применение при осуществлении следующих процессов: контактная и дуговая сварка, плазменная резка, литье, штамповка, фрезерование и сверление, шлифовка и полировка, резание и раскрой материалов, покраска и лакирование, комбинированная обработка, сборка конструкций, упаковка, транспортировка, контроль и измерения и т. д.
![]()
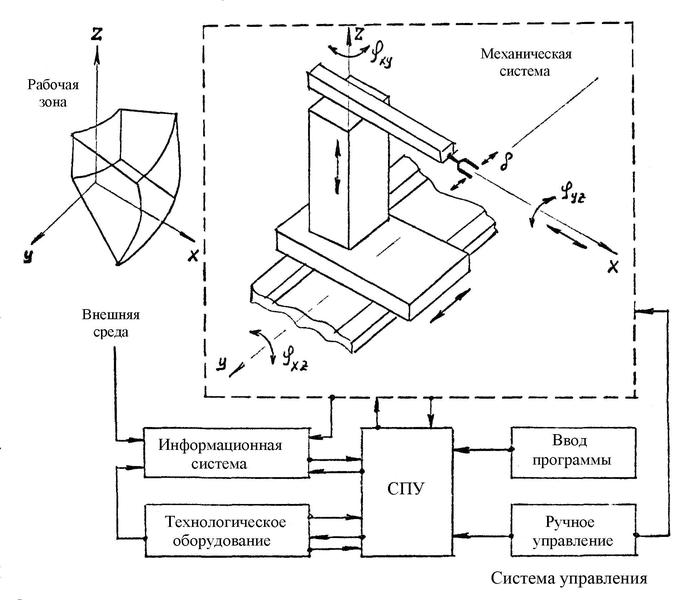
Стандартная схема работы технологического ПР приведена на рис. Для осуществления технологического процесса вводится УП. Захват заготовки производится по команде. Для этого обеспечивается поступательное перемещение манипулятора и вращательное движение захватывающего устройства. Далее заготовка перемещается в рабочую зону, где подвергается обработке. При этом рабочий орган обладает возможностью возвратно-поступательного и вращательного движения. Через датчики обеспечивается обратная связь, учитывающая изменение внешних условий.
Топовые производители
При выборе ПР особое внимание следует обратить на его производителя. Только проверенные компании гарантируют необходимое качество и надежность. Можно выделить несколько топовых производителей.
Fanuc

Компания Fanuc выпускает большой ассортимент роботов различного назначения. Идеальным вариантом для промышленных предприятий, специализирующихся на выпуске небольших электронных устройств, является модель FANUC M-1iA. Она обладает гибким модулем, хорошо имитирующим человеческую руку. Для нее характерна высокая точность и повышенная производительность. При небольшой грузоподъемности она способна обеспечить различные технологические операции. Исполнительный орган имеет форму шарнирного параллелограмма, обеспечивающую высокоскоростную сборку деталей.
Hanwha
Среди продукции компании Hanwha выделяется коллаборативный промышленный робот Hanwha HCR-5 cobot. Он относится к группе легкой грузоподъемности. Может использоваться в автомобилестроении, пищевой и фармацевтической промышленности, при обработке пластика и изготовлении электронных устройств. Имеет манипулятор шарнирного типа. Робот реагирует на внешние изменения. Эффективен при складировании и упаковке, сборке и паллетировании.

- Электропитание 100-240 VAC, 50-60 Hz
- Размеры, мм 450х560х225
- Рабочий угол поворота ±360°
- Вес, кг 20
- Класс защиты IP64
- Дальность действия 915 мм
- Максимальная рабочая скорость 1 м/сек
- Максимальная скорость вращения шпинделя (об/мин) 180°/сек
- Максимальный радиус действия 150 мм
- Полезная нагрузка, кг 5
- Скорость рабочей подачи 1000 мм/с
- Степень свободы 6
- Точность позиционирования ±0,1 мм
Kuka
В линейке продукции Kuka отмечается технологический ПР Kuka KR SCARA. Это высокоэффективный робот для сборки небольших конструкций, проведения испытаний, при погрузочно-разгрузочных работах. Робот легок и миниатюрен, с высокой производительностью. Относится к категории с легкой грузоподъемностью. Способен осуществлять интеллектуальные функции.
Universal Robots

Высококачественный коллаборативный ПР модели UR 10 предлагает компания Universal Robots. Аппарат имеет среднюю грузоподъемность. Он хорошо совмещается с сельскохозяйственным, фармацевтическим и технологическим оборудованием. Компактность позволяет располагать его на столе. Модель популярна при проведении склеивания, сварки и пайке деталей, осуществлении литья и штамповки.
UFactory
Среди новых разработок компании UFactory специалисты выделяют роботизированную руку uArm Swift Pro. На манипулятор легко устанавливаются захваты разной конструкции, головки для объемной печати, лазерный гравер и другие инструменты. Этот миниатюрный робот можно использовать для бытовых целей. Аппарат обладает высокой точностью и хорошей подвижностью. Легко переводится в режим обучения.

- Размеры, мм 150x140x281
- Материал корпуса Алюминий
- Вес, кг 2.2
- Углы обработки +90° до -90°, 0° до +130°, 0° до +106°, +90° до -90°
- Дополнительные инструменты Присоска, захват, универсальный держатель, головка для 3D печати, лазер, OpenMV
- Досягаемость, мм 50-320
- Материнская плата Arduino Mega 2560, открытый исходный код
- Осей 4
- Повторяемость 0.2 мм
- Поднимаемый вес 500 г
- Рабочая скорость, мм/мин 800
- Интерфейсы USB, Bluetooth 4
Сферы применения промышленных роботов
Возможности ПР очень велики. Разные типы роботов могут применяться практически во всех отраслях промышленности. Наиболее популярны они в таких сферах:
- транспортирование материалов, заготовок и деталей от одного станка к другому, снятие с конвейера, штабелирование, укладка на поддоны и тару;
- дуговая, контактная и точечная сварка;
- ковка и штамповка;
- литье, в т. ч. литье под давлением;
- нанесение защитных покрытий путем распыления, покраска, лакирование;
- обработка деталей, в т. ч. сверление, фрезерование, резка, шлифование, полировка, клепка, обдирка, зачистка;
- сборка различных конструкций, завинчивание;
- контроль качества, проведение лабораторных исследований и испытаний.
Важно! Роботы находят широкое применение в автомобилестроении, электротехнической и электронной промышленности, металлообработке, машино- и приборостроении.
Перспективы использования
Развитие промышленной робототехники ожидается в направлении внедрения искусственного интеллекта. Такие роботы смогут полностью заменить человека в ряде областей, избавить его от тяжелого физического и монотонного труда. В РФ выделены сферы, где использования ПР наиболее перспективно:
- Обрабатывающая промышленность. Особое внимание уделяется отечественным производителям: Aripix Robotics, BID Technologies, Bitrobotics, Hamster Robotics, «АвангардПЛАСТ», «Андроидная техника», АО «НПО НИИИП-НЗИК», «АРКОДИМ-Про», «Норма ИС», «Роботех Системы», «Русские роботы», «Эйдос-Робототехника».
- Строительство и демонтаж сооружений. В этом направлении упор делается на продукцию компаний Интехрос, FlyBrick.
- Сельское хозяйство. Перспективные модели предлагают российские производители роботов: Аgro Robotic Systems, Avrora Robotics, «Агрополис», Cognitive Technologies, Р.СЕРТ, «УрФУ», ЮРГИ, ГЕОСКАН, ЦНИИ РТК.
- Горнодобывающая промышленность. Свою перспективную продукцию предлагают VIST Mining Technologies (VIST Group) и ГЕОСКАН. Уже есть модели для работы в труднодоступных районах.
Промышленные роботы уже сейчас доказали свою высокую эффективность. Начальные затраты быстро окупаются за счет высокой производительности труда и качества продукции. Перспективные разработки с искусственным интеллектом еще больше расширяют возможности робототехники.



Оставить комментарий