Особенности кинематических схем токарных и фрезерных станков ЧПУ
Основополагающим фактором, влияющим на качество изделий, изготавливаемых на станках с числовым программным управлением, является кинематика последних. Это понятие включает в себя установление заданных кинематических связей между отдельными узлами устройства для обеспечения необходимого движения рабочего инструмента относительно обрабатываемой поверхности.
Что такое кинематика?
Любой станок, оснащенный блоками ЧПУ, обладает рабочими органами, которым с помощью управляющих программ сообщаются определенные движения, зависящие от характера выполняемых работ. В ходе эксплуатации устройств используются стандартные кинематические схемы.
Кинематическая схема станка с компьютерным управлением состоит из нескольких кинематических цепей, каждая из которых включает в себя кинематические пары и звенья.
Термин кинематическое звено определяет деталь станка (или в некоторых случаях группа деталей, которые жестко соединены между собой), связанная с другими узлами устройства. Кинематическими звеньями принято считать:
- зубчатые колеса станка;
- ходовые винты;
- шкивы и др.
ВАЖНО! Все кинематические схемы должны быть составлены в соответствии с требованиями ГОСТ 3462-61.
Несмотря на огромное число разнообразных станков и многообразие конструкций, движения рабочих органов в них во многом похожи. Это облегчает процесс изучения таких устройств и делает возможным создание единой для всех методики настройки.
Кинематическая настройка станка – установка и определение кинематических связей между его отдельными узлами для получения заданного относительного движения детали, подвергаемой обработке, и непосредственно режущего инструмента.
Движения в станках с ЧПУ делятся на два типа:
- основные;
- вспомогательные.
Так и кинематические типы, предназначенные для реализации этих движений, носят название основных и вспомогательных.
К основным относят движения резания и подачи. Главное движение может быть вращательного типа или возвратно-поступательным. Движение подачи также бывает, в зависимости от цели, прямолинейным или вращательным.
Кинематическая цепь главного движения обеспечивает заданную скорость резания (V), которая измеряется в м/мин.
Скорость подачи обозначается буквой S и может измеряться в миллиметрах:
- на 1 зуб (для многозубых инструментов);
- на 1 оборот детали;
- в минуту в случае минутной подачи;
- на 1 двойной ход.
Под вспомогательными движениями понимаются те, которые не участвуют в процессе резания и формовки деталей, но требуются для того, чтобы беспрепятственно устанавливать и снимать обрабатываемые детали, подводить и отводить рабочие инструменты, автоматизировать систему управления устройством, контролировать размеры и качество воздействия на поверхность.
В некоторых станках с ЧПУ отдельно выделяются также специальные движения, которые присущи только одному типу станков. Например, в процессе производства зубчатых колес по технологии обката в кинематическую схему добавляются движения деления и обката, обеспечивающие образование необходимого зубчатого венца у обрабатываемой заготовки.

Кинематические схемы
При формировании кинематических схем основополагающее значение имеют кинематические группы.
В них включают:
- Источник возникновения движения (двигатели различных типов).
- Органы, отвечающие за исполнение (звенья, которые принимают непосредственное участие в формировании траектории исполнительного движения. К ним относят шпиндели, суппорты, рабочие столы и т. д.).
- Органы настройки двигательных параметров (коробки скоростей, вариаторные установки и др.).
- Кинематические связи.
Фрезерного
В кинематическую схему фрезерного станка с ЧПУ включают:
- Шпиндель. Он состоит из нескольких узлов (корпуса, вращающейся части, нескольких подшипников, зажимающих устройств, системы охлаждения и обдува, балансиров и др.).
- Оси. Отвечают за перемещение по заданным управляющим блоком координатам. Чаще всего используется декартова система координат, предполагающая наличие трех осей Y, X и Z.
- Контроллер. Представляет собой электронный мозг станка с ЧПУ, в котором находится вся управляющая электроника, отвечающая за движение относительно координатных осей. Устройство предназначено для принятия G-кода и команд, отдаваемых оператором станка с ЧПУ.
- Затяжной винт. Этот элемент предназначен для фиксации вспомогательных инструментов в шпинделе устройства. От того, насколько качественно закреплен рабочий инструмент, напрямую зависит уровень обработки детали. Если нож закреплен неправильно – это может привести к порче материала и поломке станка.

Токарного
Станки с числовым программным управлением, предназначенные для токарных работ, отличаются повышенным коэффициентом жесткости, который обеспечивается за счет утяжеленных направляющих и шпинделей. Это помогает нейтрализовать эффект от воздействия крутящего момента во время обработки деталей и связанной с этим повышенной нагрузкой.
В кинематическую схему входят:
- Направляющие. В отличие от оборудования фрезерного типа направляющие токарных станков следует надежно закрепить, при их установке должен быть исключен даже минимально возможный сдвиг.
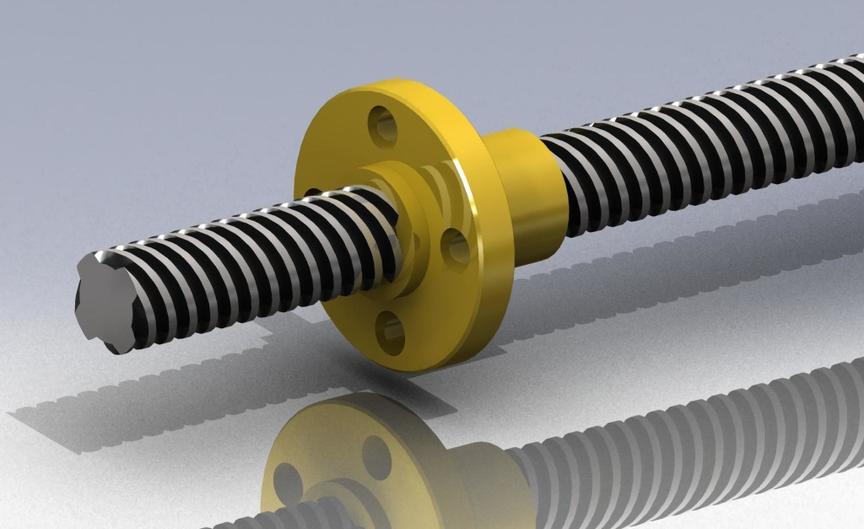
- Ходовой винт. В токарных станках использование стандартных ходовых винтов неэффективно, поэтому в устройствах с блоком ЧПУ используются шариковые винты реверсивного типа. Такие детали обеспечивают замену трения скольжения на трение качения. Эффективность узла такого типа достигает 90 %. Достоинствами являются: увеличение срока эксплуатации; снижение сопротивления к тернию; сравнительно более низкий вращательный момент.
- Станина станка.
- Шпиндель и режущие инструменты.
Таким образом, классическая кинематическая схема универсального токарного станка включает в себя:
- Станину устройства.
- Переднюю бабку, которая компонуется шпиндельным узлом и коробкой скоростей.
- Заднюю бабку, которая предназначена для поддержания конца заготовок избыточной длины и обеспечения жесткости системы.
- Фартук, где располагаются управляющие органы.
- Суппорт, служащий для перемещения режущего инструмента относительно закрепленной заготовки.
- Фрезы.
Анализ кинематики
Анализ кинематической схемы станка производится для того, чтобы определить состав приводов главного движения и подач. Ключевым параметром при этом является тип применяемого в станке двигателя.
Для проведения анализа необходимо составить уравнение кинематического баланса для возможных типов работы привода, в том числе: максимальных и минимальных частот вращения шпинделя, скорости движения рабочих органов и т. д.
Далее с помощью кинематических параметров и показателя частоты вращения nэ определяется частота и скорость вращения шпинделя nшп.
На основании полученных показателей кинематическая схема станка с ЧПУ корректируется и дополняется в соответствии с заданными параметрами.
Кинематика станка с ЧПУ – совокупность параметров, от которой зависит качество итогового изделия. Для того чтобы работа устройства осуществлялась максимально эффективно, следует своевременно проводить кинематическую настройку станка, то есть корректировать и определять кинематические связи между его отдельными органами для получения относительного движения обрабатываемого изделия и рабочих инструментов.



Оставить комментарий