Перспективы использования промышленных роботов-манипуляторов
Сейчас в качестве главной движущей силы в развитии производств и их автоматизации выступают промышленные роботы-манипуляторы. Их внедрение позволяет предприятиям выйти на новый уровень выполнения задач, увеличить эффективность работы и перераспределить обязанности между устройствами и людьми.
- Что такое промышленные роботы манипуляторы: описание
- Устройство: механизмы и характеристики
- Как работают?
- Сферы применения
- Типы промышленных роботов для манипуляционных работ
- Преимущества и перспективы использования
Что такое промышленные роботы манипуляторы: описание
Робот-манипулятор — это промышленное оборудование, которое выполняет функции человеческой руки. Это может быть как отдельное устройство, так и составная часть сложного роботизированного комплекса.

Отдельные части механизированной руки имеют соединения, которые позволяют выполнять вращательные или поступательные движения. Это обеспечивает многофункциональность таких машин.
С каждым годом увеличивается потребность в снижении эксплуатационных расходов на предприятиях, из-за чего спрос на промышленную робототехнику постоянно увеличивается. Это способствует развитию отрасли.
Уменьшения расходов на предприятиях можно добиться при помощи снижения количества ошибок, потерь сырья и числа несчастных случаев. Также необходимо сделать предприятия более производительными и технологически гибкими. Все эти вопросы решают роботы-манипуляторы. Они способны работать с высокой точностью даже в опасных условиях.
Устройство: механизмы и характеристики
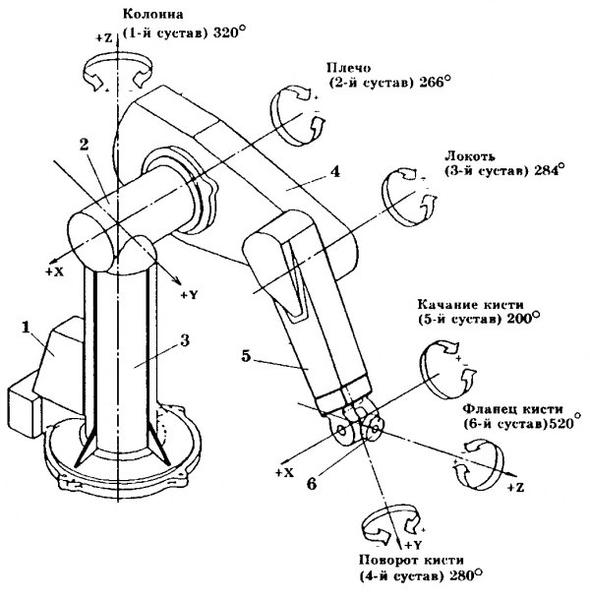
Механическая подвижная рука управляется при помощи электронной системы. Зачастую в современных устройствах не применяется гидравлика и пневматика, так как такие системы слишком дорогие в эксплуатации и недолговечные. Наиболее важные характеристики руки-манипулятора:
- Количество осей. Зачастую у промышленных роботов 4 оси. Такие устройства используются для сортировочных и фасовочных работы. Также манипулятор может иметь 6 осей, если нужно выполнять более сложные работы.
- Количество степеней свободы. Их может быть от 2 до 6. Чем больше степеней свободы, тем больше у робота возможностей и тем точнее устройство может повторять движения человеческой руки.
Основные части устройства:
- Плечо. Так называют неподвижную основу, на которую крепятся все остальные элементы.
- Локоть. Определяет главное положение манипулятора в пространстве.
- Запястье. Этот элемент отвечает за точность выполнения работы.
- Кисть. Захватывает предметы и выполняет другие действия. В качестве «пальцев» могут выступать присоски, распылители, отвертки, сварочные и другие элементы.
Количество подвижных частей и их сочленений может меняться в зависимости от потребностей. Кроме того, у одного робота может быть не одна, а сразу несколько рук, что позволяет автоматизировать одновременно несколько рутинных операций.
Манипуляторы бывают стационарными и мобильными. Вторые могут перемещаться по помещению при помощи колес, гусениц и др. На подвижных роботах всегда устанавливают специальные датчики движения для обеспечения безопасности работников и производственного процесса.
Как работают?
Отдельные части манипулятора перемещаются в пространстве благодаря приводам, которые являются аналогами мышц у человека. Если в качестве источника механической энергии выступает электродвигатель, то такие приводы называются электрическими. Также бывают гидравлические и пневматические приводы, но они практически не используются.
Управляют роботом с мобильного или стационарного пульта. Оператору необходимо следить за параметрами устройства и регулярно контролировать результаты работы. Эти операции можно производить дистанционно, используя видеокамеру. Человеку даже не нужно находиться в одном помещении с манипулятором.
Также существуют устройства, в которых реализована возможность самообучения. Работу единожды выполняют в ручном режиме, после чего робот запоминает всю последовательность действий и повторяет их.
Сферы применения
Роботы-манипуляторы подразделяют в зависимости от того, в какой области промышленности они используются. Основные сферы применения:
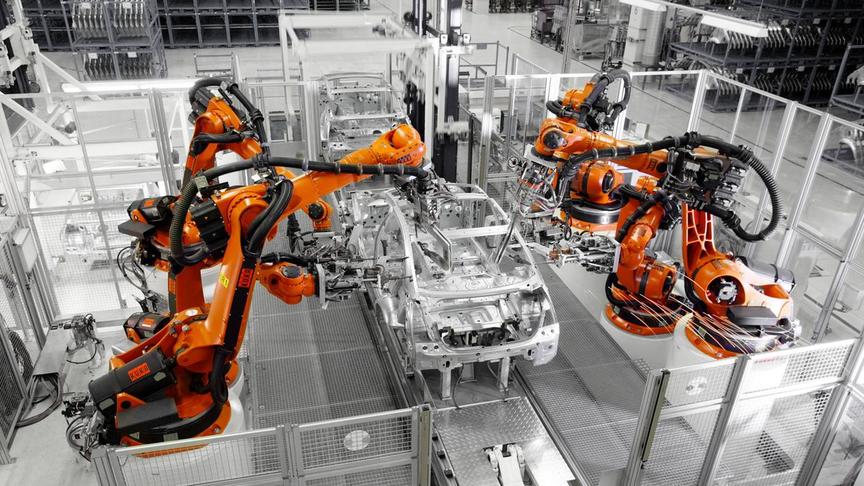
- Автомобилестроение. К примеру, на заводе Tesla установлено более 160 роботизированных рук, которые выполняют большую часть операций по сборке автомобилей. Причем их количество постоянно увеличивается.
- Электроника и электротехника. Yaskawa Motoman MH12 — это шестиосевой манипулятор, который выполняет сборку жестких дисков для компьютеров.
- Машиностроение и металлообработка. На таких производствах манипуляторы выполняют финишную обработку и шлифовку различных деталей из металла и композитных материалов.
- Химическая промышленность. В этой отрасли роботов применяют для автоматизации работы с опасными веществами. К манипуляторам, используемым в химической промышленности, предъявляются особые требования. Устройства должны быть устойчивыми к агрессивным средам и иметь высокую точность позиционирования.

- Медицина и фармацевтика. В медицине манипуляторы используют в качестве помощника на операциях. Роботы должны быть очень чувствительными, чтобы осторожно выполнять все действия. Также такие устройства позволяют совершать хирургическое вмешательство удаленно.
- Продовольствие и сельское хозяйство. В сельском хозяйстве применяют мобильные манипуляторы для сбора урожая.
Типы промышленных роботов для манипуляционных работ
Сейчас промышленные роботы условно подразделяют на 3 типа:
- автоматические;
- биотехнические;
- интерактивные.
Они имеют разные возможности. Выбор зависит от задач производства.
Коллаборативный робот-манипулятор Universal Robots UR 3e
UR 3e — это небольшой настольный манипулятор, которых хорошо подходит для автоматизации рабочих мест и выполнения легких операций по сборке. Компактный робот весит 11 кг, а его грузоподъемность составляет 3 кг. Способен вращаться во всех сочленениях на 360 градусов.
Коллаборативный робот-манипулятор Universal Robots UR 5e
Это тоже относительно компактное устройство. Его вес составляет 20,6 кг, а грузоподъемность — 5 кг. Имеет 6 осей и досягаемость в пределах 850 мм. Точность составляет 0,03 мм.
Применяется в основном для сборочных работ предметов средних размеров. Но подходит для автоматизации различных процессов, включая сварку.
Коллаборативный робот-манипулятор Universal Robots UR 10e
Манипулятор UR 10e является самой большой моделью от компании Universal Robots. Он предназначен для выполнения масштабных работ, при которых особую роль играют точность и надежность. Робот может в автоматическом режиме выполнять задачи с полезной нагрузкой в 10 кг.
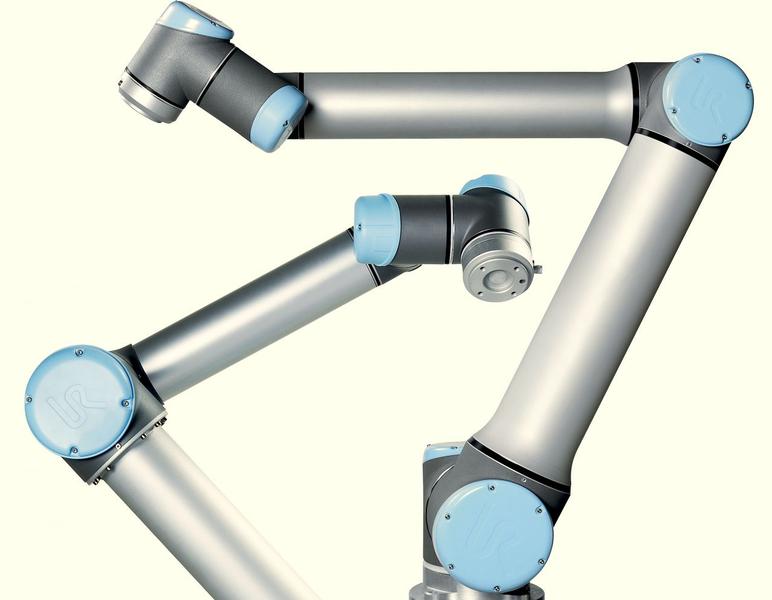
Радиус действия механической руки достигает 1300 мм. Наибольшую эффективность манипуляторы показывают на больших площадях.
Преимущества и перспективы использования
Механизированные руки для промышленных работ сейчас являются основой любого производства. При внедрении роботов в свои рабочие процессы компания обеспечивает автоматизацию, что повышает эффективность и делает производство более надежным и универсальным.
Нередко применение робототехники является единственным способом выживания компании в конкурентной среде. Использование промышленных роботов позволяет уменьшить человеческий труд и удешевить производство, так как техника справляется с работой намного качественнее и быстрее.
Среди других преимуществ применения робототехники можно выделить такие:
- Манипуляторы отлично заменяют ручной труд.
- Использование автоматов в промышленности значительно увеличивает производительность. Кроме того, роботы способны работать круглосуточно.
- Повышение экономических показателей. Техника заменяет человеческий труд, что позволяет сильно снизить расходы по зарплате сотрудникам.
- Безопасность. Использование промышленных роботов особенно актуально на вредных для людей производствах, например в литейной промышленности, при покрасочных работах, на химических предприятиях и т. д.
- Качество. Главный фактор применения робототехники — качество обработки. Точность промышленных манипуляторов достигает 0,02 мм с бесконечным количеством повторений. Если исключить из производственного процесса ручной труд, то вероятность возникновения ошибок очень мала.
- Современная техника почти не требует обслуживания. Это обусловлено применением асинхронных двигателей и высококачественных редукторов.
Современные роботы-манипуляторы способны выполнять практически любую работу с высокой точностью Автоматизация производств при помощи робототехники ведет к повышению производительности и рентабельности.
Оставить комментарий